Блок управления поворотным устройством с индикацией угла поворота светодиодами Ротор-1
В этой статье речь идет одном из вариантов блока управления поворотным механизмом антенны, с индикацией угла поворота на светодиодном табло
Идея и схема для разработки данного девайса взята у UT1WPR, который когда-то собирал подобное устройство. Однако за давностью лет автор забыл что и как и вспоминать не изъявил особого желания, файлы прошивки подрастерялись . Да и устаревший контроллер AT90S2313 сейчас приобрести невозможно. Пришлось заняться доработкой схемы (хотя она осталась практически без изменений) и написанием программы управления микроконтроллером. По сути это не разработка, а доработка, с целью создания реально работающего девайса.
Данное устройство разработано для управления электродвигателем постоянного тока, вращающего антенну через редуктор. На выходной оси редуктора (оси поворота антенны) закреплен потенциометр, или любой другой датчик, выполняющий функции преобразователя угла поворота в напряжение, которое возвращается в блок управления. Напряжение в блоке управления преобразуется микроконтроллером (МК) во время заряда конденсатора, затем им подсчитывается, и в соответствии с числом зажигается один из светодиодов, отображающих положение антенны. Для формирования напряжения угла используется напряжение, подаваемое на двигатель. Внутри редуктора собрана небольшая схема, позволяющая получать всегда однополярное напряжение на движке потенциометра относительно общего провода МК системы. Это напряжение стабилизировано, чтобы исключить влияние изменения напряжения на точность углового преобразования. Коммутация питания электродвигателя осуществляется двумя реле, с двумя группами контактов на переключение каждое. Команды на управление реле вырабатывает МК, который взял на себя и функции концевых выключателей поворота. Напряжение питания двигателя не связано с питанием МК системы, имея лишь общую "землю". Таким образом можно применять довольно широкую номенклатуру двигателей.
А теперь, если конструкция заинтересовала вас, более подробно об устройстве и деталях.

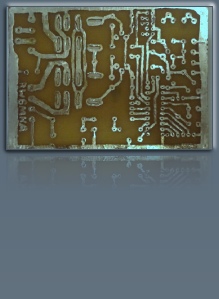
Печатка блока управления
Выполнена на одностороннем текстолите.

Светодиодный монитор
Печатка. Светодиоды устанавливаются с этой стороны.
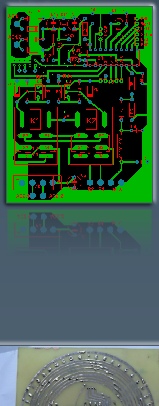
Печатная плата блока управления
Для просмотра печатки в формате gif кликнуть на изображении

Готовая плата блока управления
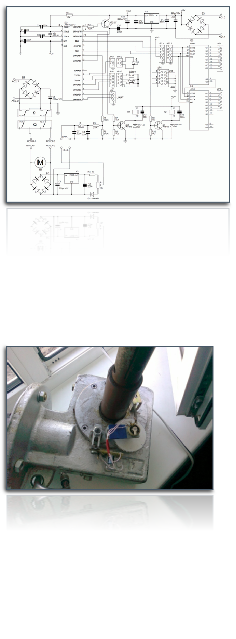
Датчик
Схема узла очень проста и в комментариях особо не нуждается. Задача этого датчика линейно менять напряжение на выходе в зависимости от угла поворота потенциометра. Для этого понадобится потенциометр с линейной характеристикой. Можно применить потенциометр кругового вращения типа ПТП-1 или, как в моей конструкции, ППБ-1В. Интегральный стабилизатор IC1 обеспечивает достаточную, для наших потребностей точность напряжения, хотя при значительных перепадах температур показания могут иметь существенную погрешность. Лучше применить стабилитрон с высоким коэффициентом температурной стабилизации типа КС191Ф. В качестве IC1 можно использовать как импортные, типа 78LO08 с током стабилизации 100mA, так и отечественные интегральные стабилизаторы. Сложность в изготовлении вызовет только привод от потенциометра к выходному валу редуктора. Это может быть, как в моей конструкции, две пластиковые шестерни с передаточным числом 1,5х1 или 2х1( в случае с потенциометр кругового вращения 1х1). Одна крепиться на валу редуктора, а вторая непосредственно на валу потенциометра. Можно применить и дискретный переключатель сопротивлений выполненный на герконах.
Блок управления и индикации
При нажатии на одну из кнопок поворота S-Right или S-Left МК, через ключи на транзисторах Q2 и Q3, включает реле, подавая питание на электродвигатель редуктора и датчик угла поворота. Напряжение с датчика приходит на вход аналогового компаратора МК. К другому входу компаратора подключен конденсатор и питание через транзисторный ключ. Конденсатор заряжается и когда напряжение заряда станет таким же как напряжение от датчика, транзисторный ключ выключится, а таймер МК выдаст время заряда конденсатора. Это время программой преобразуется в код группы светодиодов и номер светодиода в группе. С выхода МК код поступает на индикатор, выполненый с целью экономии выводов МК, на двух сдвиговых регистрах IC3, IC4 МОП-структуры. Светодиоды сгруппированы в группы по 8 штук. Таких групп может быть до 8. В моей конструкции их 48 (6 групп по 8 светодиодов). В IC4 поступает код группы и в нужной группе выставляется 0, в IC3 поступает код светодиода и в нужном номере выставляется 1. После остановки вращения остается гореть последний зажженный светодиод. Если от датчика в момент вращения не поступило угловое напряжение, то реле выключаются, а индикатор прогоняет светодиоды по кругу, сигнализируя о неисправности датчика. При достижении крайних точек поворота, продолжение поворота в эту сторону запрещается и соответствующая кнопка блокируется. Этим реализуется функция конечных выключателей вращения. Для того чтобы обозначить точки окончания поворотов используется кнопка установки S-Setup. Если удерживать нажатой эту кнопку в течение 3с, МК перейдет в режим установки сектора поворота, о чем сообщит зажегшийся светодиод индикации установки D2. Нажимая кнопки поворота, устанавливаем границы сектора вращения. Следует иметь ввиду, что этот сектор будет восприниматься МК как 360градусов. Для выхода с установочного режима необходимо опять удерживать кнопу установки в течение 3с, при этом светодиод индикации установки потухнет. Данные о начале и конце поворота записываются в энергонезависимую память МК и хранятся там до новой переустановки.
В моём варианте используется МК фирмы ATMEL ATtiny2313. Это относительно дешевый МК обладающий всем необходимым для данной конструкции. Это практически копия AT90S2313, используемого автором идеи. Реле используются любые на напряжение 12В с двумя группами контактов, позволяющими коммутировать токи необходимые для работы электромотора редуктора.Используемый мной мотор-редуктор стеклоочистителя потребляет ток около 6-7А, что повлияло на выбор реле и я остановился на импортных реле типа Tianbo на фото К1 и К2.
Соответственно диодный мостик В1 так же рассчитан на ток потребления мотора. Он тоже импортный типа RS1001M на ток 10А. В качестве В2 и В3 использовались КЦ405А или диоды 1N4004. Трансформатор использовался ТС-180, с перемотанными на нужный ток и напряжение вторичными обмотками.Сдвиговые регистры CD4094. Они установлены на плате индикации (фото) . Светодиоды любые с током около 20mA.
Остальные детали особенностей не имеют. Разъём JP4 используется для внутрисхемного программирования МК. Разъём JP6 (в этой версии не используется), используется для передачи данных к компьютеру по USART интерфейсу. Конструктивно блок управления и индикации выполнен в одном корпусе с блоком питания двигателя и антенным переключателем. Корпус выполнен из 10мм фанеры, прошпаклёванной и окрашенной. Передняя панель выполнена из алюминия.
Программирование контроллера производится прямо в монтаже с помощью программы PonyProg. Программатор собран по схеме из книги: Голубцов М.С. , Кириченкова А.В. «Микроконтроллеры AVR: от простого к сложному».
{kind=link}
{kind=link}
Файл печатки в формате .lay . Открывать с помощью Sprint-Layout 6.0
Файл печатки индикации в формате .lay
Схема в формате .spl . Открывать с помощью SPLAN7.0
Видно шестерни привода 1:1,5
Датчик
Для просмотра схемы в формате jpg кликнуть изображение